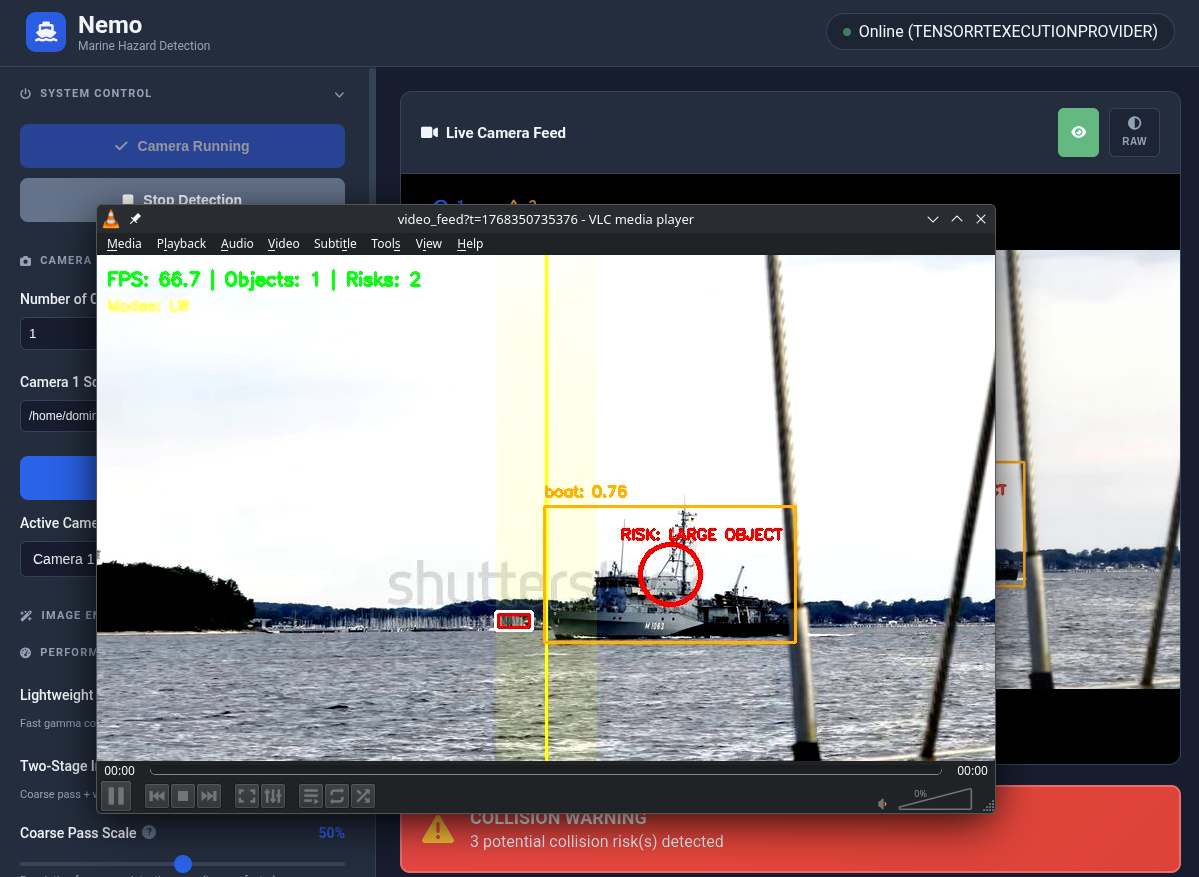
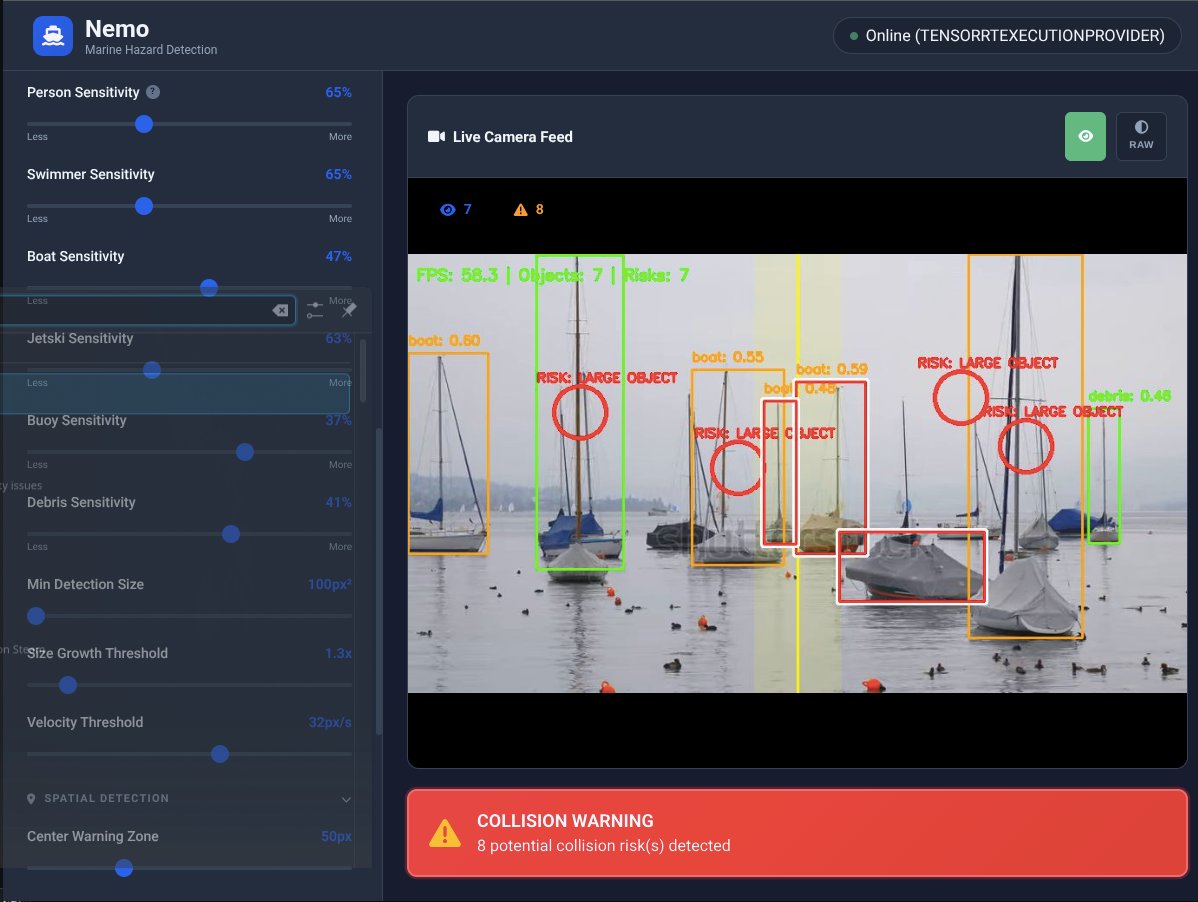
Real-Time Object Detection
A custom maritime AI model trained to detect and classify 6 object types in real time
🚤
Vessels
Motorboats, sailboats, kayaks, commercial vessels
🧑
Persons
People on docks, other vessels, or near water
🏊
Swimmers
People swimming in the water
🏍️
Jet Skis
Personal watercraft and wave runners
🔴
Buoys
Navigation markers, channel buoys, mooring buoys
🪵
Debris
Floating debris, logs, hazardous objects